Swampocalypse
A location-based VR experience combining environmental storytelling, motion simulation, and zombie survival in the post-apocalyptic Miami Everglades.
The Problem
The Everglades, one of the most distinctive ecosystems in the US, faces mounting threats from contamination, invasive species, and pollution. These critical environmental issues often fail to connect with audiences through traditional outreach methods.
How can we make environmental education engaging and memorable while delivering an immersive entertainment experience?
Target Audience
- VR Enthusiasts: Looking for cutting-edge location-based experiences
- Environmental Advocates: Interested in conservation and sustainability
- Action Game Players: Seeking exciting zombie-survival gameplay
- Educational Institutions: Museums and schools seeking engaging learning tools
Project Overview
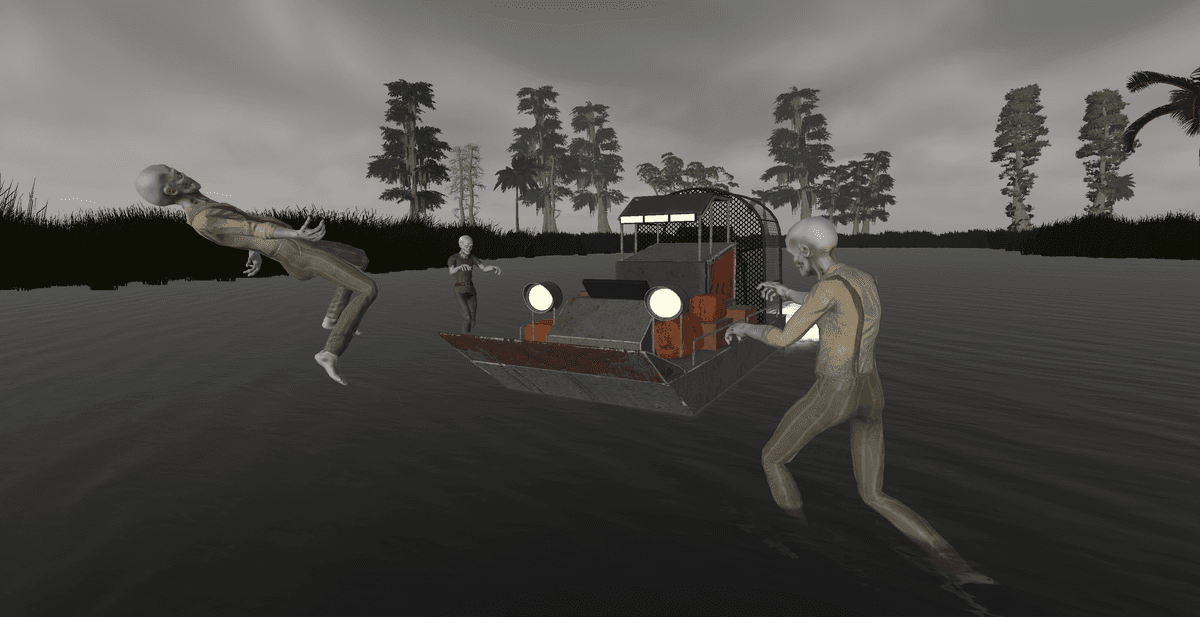
Swampocalypse is a location-based VR experience set in a post-apocalyptic Miami Everglades. Players pilot a rusty airboat through dangerous and polluted swamps, using the Qubic QS-S25 motion rig, which mirrors in-game movement for a fully immersive experience.
The journey begins with the player being placed in the boat, given a weapon, and tasked with stopping the pollution that a nearby factory is emitting. During the journey towards the factory, zombies swarm the player and damage the boat, preventing the user from reaching the objective.
Players must traverse through the water, avoiding enemies and obstacles, and shut off the factory pipes before the pollution gets worse—all while learning important environmental facts.

Team & Collaboration
A multidisciplinary team bringing diverse expertise
Gameplay Experience
See the experience in action
Early Prototype
Where it all began
In-House Arduino Rig
Before upgrading to the professional Qubic QS-S25 platform, the project started with a custom-built Arduino-based motion rig. This early prototype was built in-house to explore how physical motion could be synchronized with the virtual experience.
Working with this early rig laid the groundwork for understanding motion synchronization, servo control, and the engineering challenges that come with translating VR physics into real-world movement, knowledge that proved invaluable when integrating the final platform.
Rules & Objectives
Balancing action with education
The main purpose is to deliver a fun and educational experience, where players eliminate zombies while learning about environmental conservation. Each level presents unique obstacles and events that players must navigate to stop the factory's pollution.
Visual Design Elements
3D models and environments
Airboat Model

Model of the airboat in the experience, modeled in Maya and textured in Substance Painter.
Zombies
Models of the zombies, sourced from the Unity Asset Store, integrated with custom animations and ragdoll physics to create dynamic enemy behavior.
Alligator

Alligator model sourced from the Unity Asset Store. Implemented in experience to add environmental authenticity and additional threats for the player to navigate around, enhancing immersion and gameplay variety.
Mutated Iguana

Mutated Iguana model sourced from the Unity Asset Store. Implemented as the final boss character in the experience, featuring custom animations and challenging gameplay mechanics.
Development Process
From concept to implementation
Field Research
Before starting development, our team conducted field testing in the actual Everglades. We took an airboat tour to experience firsthand what it's like to pilot through the Miami Everglades, studying the movement, sounds, and environment to ensure authentic recreation in VR.
Iterative Design
Originally conceived as a racing simulator, the project evolved through team collaboration. We pivoted to an environmental zombie-survival experience that better served our dual goals of entertainment and education.
Weekly team meetings allowed us to discuss progress, integrate new assets, and plan next steps, ensuring all disciplines worked in harmony.
Technical Development
Built in Unity using C#, incorporating assets from the Unity Asset Store, Sketchfab, MeshyAI, and custom models from our 3D team. Sound design was crafted in-house, and UI prototyped in Figma before implementation.
Hardware Integration
Started with an Arduino-based in-house motion rig, working closely with engineers to synchronize movement. Later upgraded to the professional Qubic QS-S25 system, developing custom scripts to translate boat physics into realistic motion platform movements.
My Role & Responsibilities
Lead Developer & Team Lead
Leadership
As lead developer, I'm responsible for nearly all aspects of the Unity application—implementing everyone's work in the game and connecting the program to the physical rig. I lead a talented team of 3D modelers, UI/UX designers, and sound engineers through weekly meetings where we discuss progress, implementation strategies, and future steps.
Impact
Collaborating with a great team really inspires and motivates me to do my best work. It's incredibly rewarding to see all our efforts come together to create an experience that's both entertaining and educational, potentially changing how people think about environmental conservation.
Technical Deliverables
Vehicle Movement
After field testing at an airboat tour in the Everglades, I implemented realistic boat physics and controls to match the feel of driving an airboat through the Miami Everglades, accounting for how airboats are controlled and their unique water physics.
Weapon System
Developed multiple weapons (crossbow, shotgun, assault rifle) with unique mechanics. Designed all weapon interactions, firing mechanics, and the ammo system to create varied gameplay experiences.
Enemy AI
Created zombie enemies with health systems, movement patterns, and ragdoll physics. Designed a multi-stage boss with various attack patterns for the climactic final scene.
Level Design
Transformed the original racing concept into environmental zombie-focused stages. Each level incorporates authentic Everglades elements with apocalyptic twists, balancing realism with entertainment.
Optimization
Implemented object culling and environment density optimization to maintain maximum frame rate on Meta Quest 3. Used Unity's terrain editor, Mesh Baker, and strategic fog placement to balance visual quality with performance.
Hardware Integration
Integrated software with physical motion rigs—from Arduino-based in-house systems to the Qubic platform using MotionSDK. Translated boat physics into synchronized rig movement for full immersion.
Challenges & Solutions
Pushing boundaries and learning through adversity
Motion Sickness
Challenge: VR-induced motion sickness is amplified when driving vehicles.
Solution: Implemented dynamic vignette effects that darken screen edges based on movement. The physical motion rig synchronization further reduced sickness by aligning virtual and physical motion.
Performance Constraints
Challenge: Meta Quest 3 hardware limitations restricted environmental complexity.
Solution: Balanced realism with performance using Unity's terrain editor, Mesh Baker for optimization, strategic fog placement, and intelligent object culling to maintain maximum frame rate.
Hardware Integration
Challenge: Limited documentation on custom motion rig development and integration.
Solution: Through trial and error and team collaboration, learned Arduino systems, servo motors, and professional motion rig APIs. Developed custom scripts to translate physics accurately.
The Motion Platform
Hardware integration for ultimate immersion

QUBIC SYSTEM QS-S25
We use the QUBIC SYSTEM QS-S25 Advanced Motion Cockpit, a 6-DOF (six degrees of freedom) motion platform designed for high-fidelity simulation experiences.
This advanced motion platform delivers precise, synchronized movement that perfectly matches the in-game airboat physics, creating an unparalleled sense of immersion as players navigate through the treacherous swamps. The rig moves in real-time with the virtual boat, amplifying every turn, bump, and wave.
Key Learnings
What this project taught me
Technical Growth
These challenges forced me outside my comfort zone, teaching me hardware integration, performance optimization for VR, and advanced Unity physics—skills I wouldn't have gained from traditional projects. Challenges aren't obstacles; they're opportunities for growth.
Collaboration Power
Working with talented people from different backgrounds taught me the irreplaceable value of diverse perspectives. Everyone's unique skillsets merged to create something none of us could have built alone. This reinforced that collaboration is essential in any meaningful endeavor.
Purpose-Driven Development
Creating something that addresses real-world environmental issues gave the work deeper meaning. I learned that games can be powerful vehicles for social impact, making critical topics engaging and memorable in ways traditional media cannot.
Iterative Design
The pivot from racing simulator to environmental adventure demonstrated that great ideas evolve. Being flexible and responsive to feedback—from teammates and playtesting—ultimately creates better experiences than rigidly following an initial plan.
Reflection & Impact
I chose to showcase Swampocalypse because it represents everything I've learned and achieved as a game developer. This project allowed me to merge storytelling, game design, and technical skills into a cohesive experience that entertains while educating about critical environmental issues.
Beyond the technical achievements, this project gave me a profound sense of purpose. The Everglades faces real threats from pollution and invasive species—issues that often fail to resonate through traditional outreach. By transforming environmental education into an engaging adventure, we created something that might actually change how people think about conservation.
This isn't just a game—it's a demonstration of how interactive media can inspire real-world change.
Next Steps
Expand Content
Add more levels exploring different Everglades ecosystems, each highlighting specific environmental challenges and conservation methods.
Educational Partnerships
Collaborate with environmental organizations and museums to deploy the experience as an educational tool, reaching wider audiences.
Refine Experience
Continue gathering user feedback to improve motion comfort, gameplay balance, and educational effectiveness.